Знешумлення (профільоване)
Простий у використанні та високоефективний модуль знешумлення, адаптованого до індивідуальних профілів шуму широкого спектру сенсорів камер.
Одна проблема з багатьма алгоритмами знешумлення полягає в тому, що вони припускають, що дисперсія шуму не залежить від світності сигналу. Профілювавши шумові характеристики сенсора камери за різних значень ISO, можна оцінити дисперсію при різній освітленості, а алгоритм знешумлення можна відкоригувати для більш рівномірного згладжування шуму.
В даний час Darktable має профілі шуму сенсорів для понад 300 популярних моделей камер від усіх найбільших виробників. Якщо ви створюєте власний профіль шуму для камери, яка ще не підтримується Darktable, не забудьте поділитися ним із командою розробників Darktable, щоб вони могли включити його до наступного випуску! Для отримання додаткової інформації див. сторінку підтримка камери Darktable.
🔗Режими
Модуль Знешумлення (профільоване) реалізує два алгоритми, кожен з яких доступний або в простому у використанні режимі “авто”, або в розширеному ручному режимі з додатковими елементами керування:
- Нелокальні середні
- Цей алгоритм працює в просторовій області приблизно так само, як і модуль Знешумлення астрофото. Він усереднює кожен піксель з кількома оточуючими пікселями на зображенні. Вага такого пікселя в процесі усереднення залежить від подібності його оточення з оточенням пікселя, що обробляється. Для вимірювання подібності використовується зразок із визначеним розміром.
-
Зверніть увагу, що цей алгоритм досить ресурсомісткий.
- Вейвлети (за замовчуванням)
- Цей алгоритм працює в домені вейвлетів та забезпечує спрощений інтерфейс користувача. Вейвлет-розкладання дозволяє регулювати силу знешумлення в залежності від грубості шуму на зображенні. Цей режим можна використовувати як в кольоровому режимі Y0U0V0 (що дозволяє незалежно контролювати світловий та кольоровий шум), так і в кольоровому режимі RGB (що дозволяє незалежно контролювати шум для кожного каналу RGB).
-
Вейвлет-алгоритм менш ресурсомісткий, ніж нелокальні середні.
🔗Світловий шум проти кольорового шуму
Як “нелокальні середні”, так і “вейвлет” алгоритми можуть ефективно долати світловий шум та кольоровий шум.
Раніше пропонувалося використовувати два окремі екземпляри цього модуля для незалежної боротьби з колірними та світловими шумами. Це більше не рекомендується, оскільки модуль Знешумлення (профільоване) розміщується перед модулем Вхідний колірний профіль в конвеєрі (щоб параметри профілю були точними), а режими змішування кольорів слід використовувати лише після того, як застосовано вхідний колірний профіль .
Нові алгоритми в цьому модулі тепер пропонують власні методи для окремої обробки світлових та кольорових шумів і в обох випадках це можна обробити за допомогою одного екземпляра модуля.
🔗Елементи керування модулем
Модуль Знешумлення (профільоване) забезпечує деякі елементи керування, які не залежать від використовуваного алгоритму. Вони описані спочатку, перш ніж переходити до елементів керування для конкретного алгоритму.
Описуючи елементи керування, специфічні для алгоритму, ми спочатку розглянемо спрощений інтерфейс, а потім перейдемо до більш досконалих елементів керування для цього алгоритму.
Зауважте, що за замовчуванням повзунки мають мінімальні та максимальні значення. Однак це лише м’які обмеження і, де потрібно, вищі значення можна ввести, клікнувши правою кнопкою миші на повзунку та ввівши нове значення.
🔗Спільні елементи керування
- Профіль
- Darktable автоматично визначає модель камери та ISO на основі даних Exif вашого raw файлу та шукає відповідний профіль у своїй базі даних. Якщо ваше зображення має проміжне значення ISO, налаштування будуть інтерпольовані між двома найближчими наборами даних у базі даних і це інтерпольоване налаштування відображатиметься як перший рядок у списку. Ви також можете вручну замінити цей вибір, якщо це необхідно. Повторний вибір верхнього запису у списку поверне вас до профілю за замовчуванням.
- Режим
- Виберіть, який алгоритм знешумлення використовувати (див. вище) і чи представляти спрощений (“авто”) або повний ручний інтерфейс для цього алгоритму.
- Адаптивне до ББ перетворення
- Оскільки баланс білого посилює кожен з RGB-каналів по-різному, кожен канал демонструє різні рівні шуму. Цей прапорець змушує обраний алгоритм адаптуватися до налаштувань балансу білого. Цей параметр слід вимкнути у другому екземплярі, якщо ви застосували перший екземпляр із режимом змішування кольорів.
- Відкоригувати автовстановлені параметри (лише “авто” режими)
- Автоматично коригувати всі інші параметри поточного алгоритму знешумлення за допомогою одного повзунка. Це особливо корисно, коли вам довелося збільшити експозицію на недоекспонованому зображенні, що зазвичай створює додатковий шум (як якщо б ви зробили знімок із більшим значенням ISO). Цей елемент керування компенсує це за допомогою налаштувань, подібних до тих, що використовуються для вищого ISO. “Ефективний ISO”, який використовується алгоритмом знешумлення, – це фактично використаний ISO, помножений на значення цього повзунка.
- Інтенсивність
- Точна настройка знешумлення. Значення за замовчуванням було вибрано, щоб максимізувати пікове відношення сигнал/шум. Це головним чином справа смаку – чи віддаєте ви перевагу низькому рівню шуму за рахунок дрібних деталей, чи ви приймаєте більше шуму, щоб краще зберегти дрібні деталі.
- Зберігати тіні (лише ручний режим)
- Встановіть менше значення цього елемента керування, щоб більш агресивно знешумлювати тіні. Зазвичай із збільшенням шуму вам потрібно буде зменшувати цей параметр.
- Корекція зміщення (лише ручний режим)
- Виправляє будь-які кольорові обарвлення, які можуть з’являтися в тінях. Збільште це значення, якщо темні тіні здаються занадто зеленими, зменште, якщо вони здаються занадто пурпурними.
🔗Повзунки режиму “нелокальні середні, авто”
- Вага центрального пікселя (деталі)
- Контролює кількість деталей, яка має зберігатися алгоритмом знешумлення. За замовчуванням цей параметр матиме низьке значення, що означає, що алгоритм буде однаково обробляти як світловий, так і кольоровий шум. Перемістіть цей повзунок вправо, щоб зменшити кількість знешумлення світлового шуму, так що алгоритм в першу чергу впливатиме на шум кольоровості. Відрегулювавши цей повзунок разом із повзунком інтенсивність, ви зможете знайти хороший баланс між знешумленням світлового та кольорового шуму.
🔗Повзунки режиму “нелокальні середні”
Коли ви вимикаєте автоматичний режим для нелокальних середніх, повзунок відкоригувати автовстановлені параметри замінюється на наступні елементи керування. Ви можете скористатися повзунком автоматичного коригування для отримання деяких початкових налаштувань, тоді, коли ви перейдете в ручний режим, повзунки відображатимуть еквівалентні ручні налаштування. Далі ви можете продовжувати точну настройку ручних налаштувань з початкової точки автоматичного встановлення.
- Розмір зразка
- Контролює розмір зразків, де проводиться пошук відповідності при визначенні, які пікселі усереднювати – див. Знешумлення астрофото для отримання додаткової інформації. Збільште це значення для зображень із більшим рівнем шуму, але пам’ятайте, що високі значення можуть згладити дрібні контури. Вплив цього повзунка на час обробки мінімальний.
- Радіус пошуку
- Контролює, наскільки далеко від пікселя алгоритм намагатиметься знайти подібні зразки. Збільшення значення може дати кращі результати для дуже шумних зображень, коли видно грубий зернистий шум, але цей параметр дуже впливає на час обробки (час обробки збільшується за квадратом цього параметра). Низьке значення прискорить виконання, більш високе – уповільнить. У більшості випадків краще використовувати параметр діапазону, який має подібний ефект, але без великих витрат на обробку.
- Діапазон (грубий зернистий шум)
- Як і Радіус пошуку, цей повзунок визначає, наскільки далеко від пікселя алгоритм намагатиметься знайти подібні зразки. Однак він робить це, не збільшуючи кількість розглянутих зразків. Таким чином, час обробки залишиться приблизно однаковим. Збільшення значення зменшить грубий зернистий шум, але може згладити локальний контраст. Цей повзунок особливо ефективний для зменшення кольорових шумів.
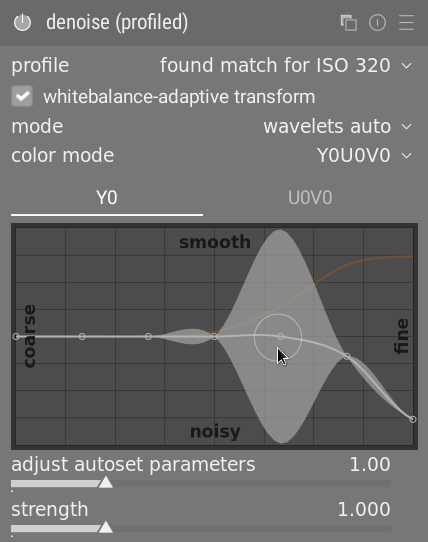
🔗Вейвлет-криві
Вейвлет-криві відображаються, коли вибрано один із режимів “вейвлету”.
Шум на зображенні, як правило, складається з дрібнозернистого та грубозернистого шуму у різних співвідношеннях. Криві вейвлетів дозволяють регулювати інтенсивність знешумлення залежно від грубості видимого шуму. Лівий кінець кривої буде діяти на дуже грубий зернистий шум, тоді як правий буде діяти на дуже дрібнозернистий шум. Підняття кривої збільшить кількість згладжування, тоді як зниження кривої зменшить.
Наприклад, ви можете зберегти дуже дрібнозернистий шум, потягнувши крайню праву частину кривої вниз. При боротьбі з кольоровими шумами (наприклад, на кривій U0V0 або на другому екземплярі модуля в режимі змішування кольорів) ви можете безпечно піднімати праву частину кривої, оскільки кольори не дуже змінюються на дрібних масштабах. Це може бути корисно, якщо ви бачите кілька шумних ізольованих пікселів з неправильним кольором.
🔗Режим вейвлетів Y0U0V0
Кращим способом використання вейвлетів є кольоровий режим Y0U0V0. Цей режим розділяє криві знешумлення на компоненти яскравості (Y0) та кольору (U0V0). Тож ви можете використовувати криву Y0, щоб контролювати рівень світлового шуму, а криву U0V0, щоб контролювати рівень колірного шуму.
🔗Режим вейвлетів RGB
До того, як був введений кольоровий режим Y0U0V0, вейвлет-знешумлення могло виконуватися лише безпосередньо на каналах R, G та B, або разом або окремо.
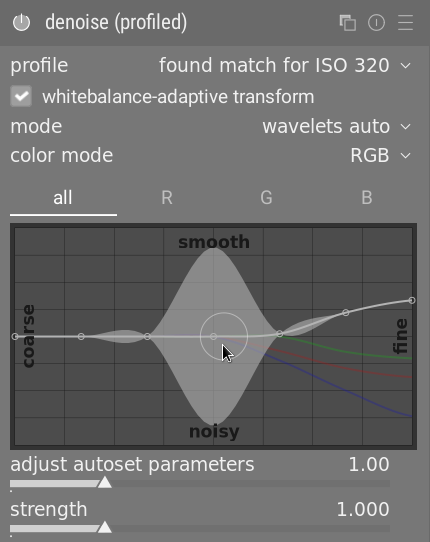
Якщо ви хочете незалежно знешумлювати канали RGB, найкращий спосіб це зробити – використовувати екземпляр модуля Калібрування кольору, розміщений безпосередньо перед модулем Знешумлення (профільоване), щоб він виводив сірий канал, що базується лише на червоному каналі, а потім знешумити монохромне зображення за допомогою червоної вейвлет-кривої. Повторіть цю процедуру для синього та зеленого каналів. Ця процедура віднімає багато часу, але дає найкращий результат, оскільки дивитись на колір шумного пікселя не є надійним способом визначити, який канал слід регулювати. Наприклад, шумний червоний піксель може бути пов’язаний з піком шуму на червоному каналі, але також може бути через слабкий шум на синьому та зеленому каналах.
Проблема незалежного знешумлення RGB-каналів полягає в тому, що в кінці все ще може бути залишковий кольоровий шум, який вимагає надмірного згладжування для усунення. Це насправді було однією з ключових мотивацій реалізації кольорового режиму Y0U0V0.
🔗Повзунки режиму вейвлетів
Коли ви виводите вейвлети з режиму авто, повзунок відкоригувати автовстановлені параметри замінюється елементами зберігати тіні та корекція зміщення, переліченими вище в розділі спільні елементи керування.